Learning to Walk and Fly with Adversarial Motion Priors
Jul 1, 2024
From cad to urdf: Co-design of a jet-powered humanoid robot including cad geometry,
Jul 1, 2024
Co-design optimisation of morphing topology and control of winged drones
May 1, 2024
Nonlinear In-situ Calibration of Strain-Gauge Force/Torque Sensors for Humanoid Robots
Nov 1, 2023
Online Non-linear Centroidal MPC for Humanoid Robots Payload Carrying with Contact-Stable Force Parametrization
May 1, 2023
Failure Detection and Fault Tolerant Control of a Jet-Powered Flying Humanoid Robot
May 1, 2023
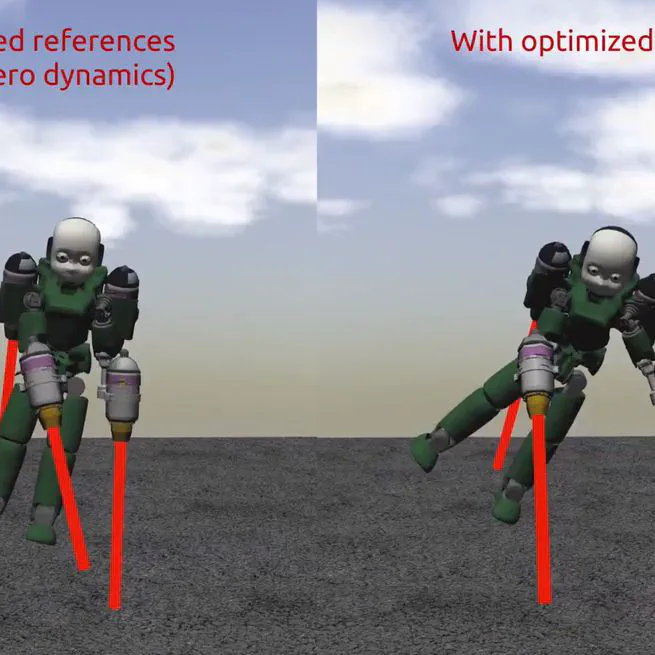
Whole-Body Trajectory Optimization for Robot Multimodal Locomotion
Nov 1, 2022
Nonlinear Model Identification and Observer Design for Thrust Estimation of Small-scale Turbojet Engines
May 1, 2022
Centroidal Aerodynamic Modeling and Control of Flying Multibody Robots
May 1, 2022
Towards Partner-Aware Humanoid Robot Control Under Physical Interactions
Sep 1, 2020