About Me
I obtained my bachelor and master degrees in Mechanical Engineering from Politecnico di Milano (Milan, IT) in 2013 and 2015. I completed my Ph.D. in Bioengineering and Robotics at Università degli Studi di Genova (Genoa, IT) in 2020. Presently, I am a Post-doctoral Researcher at the Artificial and Mechanical Intelligence Laboratory, Istituto Italiano di Tecnologia (Genoa, IT).
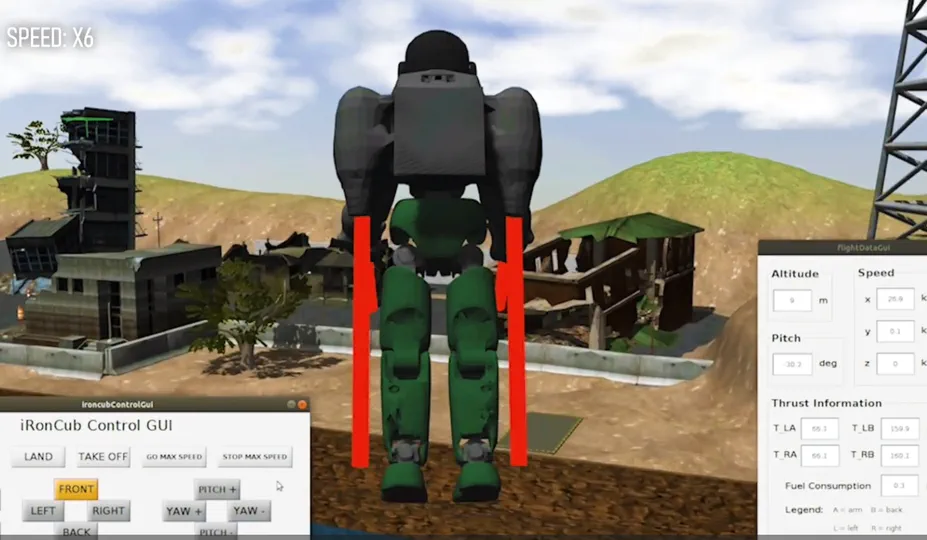
My primary research focuses on the analysis and design of whole-body flight controllers for humanoid robots, specifically within the Aerial Humanoid Robotics research area. As the Scrum Master and technical coordinator of the iRonCub group, my goal is to enable the humanoid robot iCub to attain flight capabilities.
- Robotics 🤖
- DIY projects 🔨
- Hicking 🚵
- Gardening 🌱
PhD in Bioengineering and Robotics
University of Genoa (IT)
M.Sc. in Mechanical Engineering
Politecnico di Milano (IT)
B.Sc. in Mechanical Engineering
Politecnico di Milano (IT)
Experience
PostDoctoral Researcher
Istituto Italiano di Tecnologia- Lead technical coordination and management (Scrum Master) of the iRonCub team, a multidisciplinary group developing a jet-powered humanoid robot for disaster response.
- Implementing automatic tuning of flight controllers using Reinforcement Learning; designing whole-body flight controllers for humanoid robots.
- Co-tutor Ph.D. candidates and M.Sc. students in areas including robot force/torque control, aerodynamics, trajectory planning, jet engines and sensor modeling, hardware design and co-design strategies.
Ph.D. Researcher
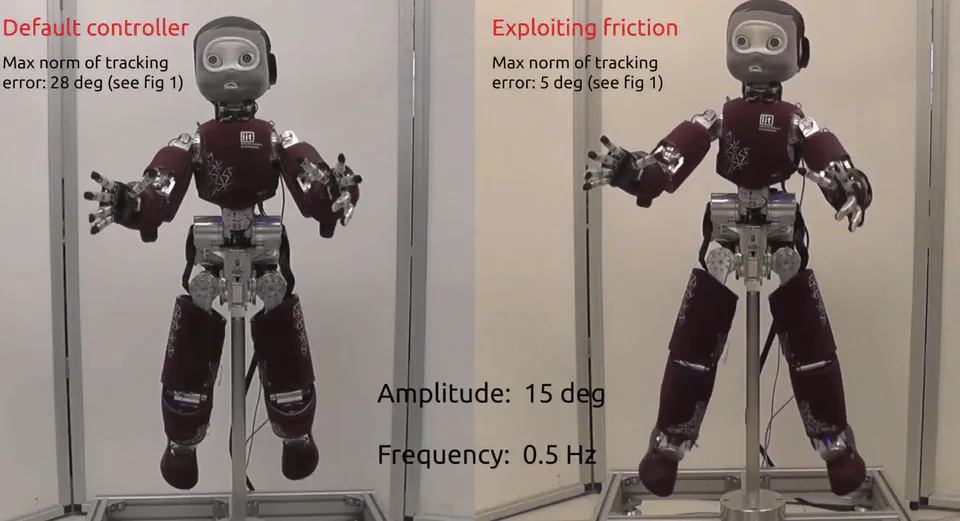
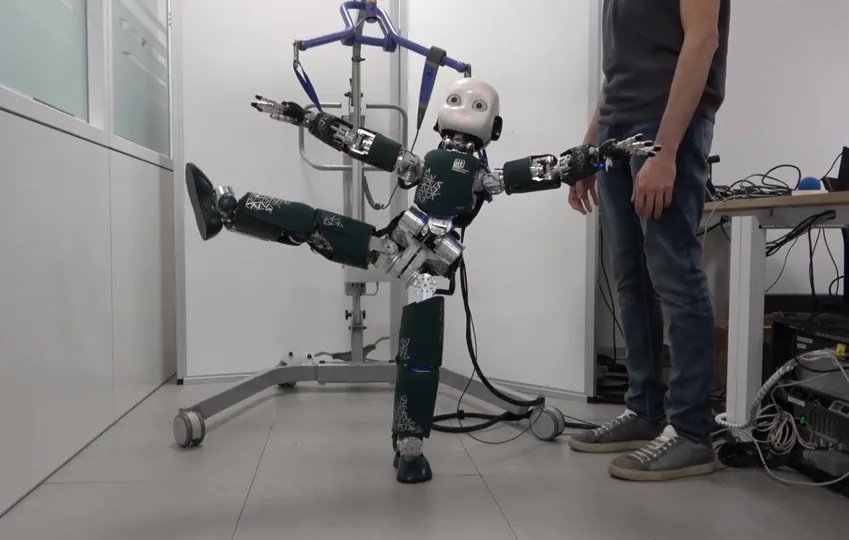
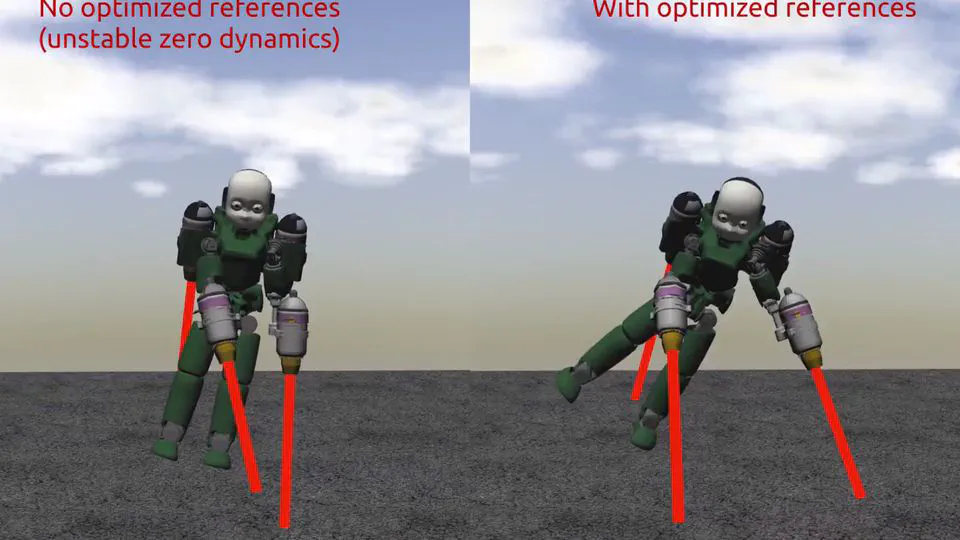
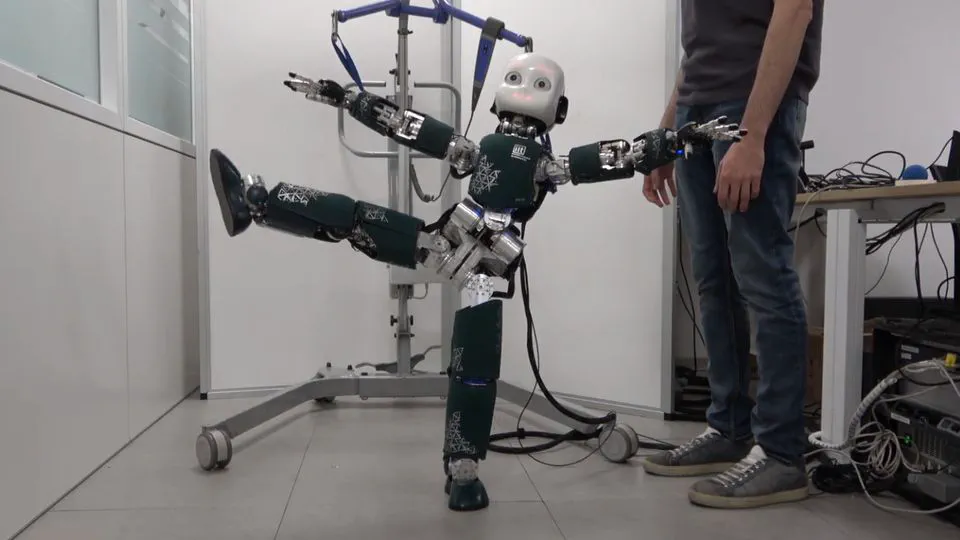
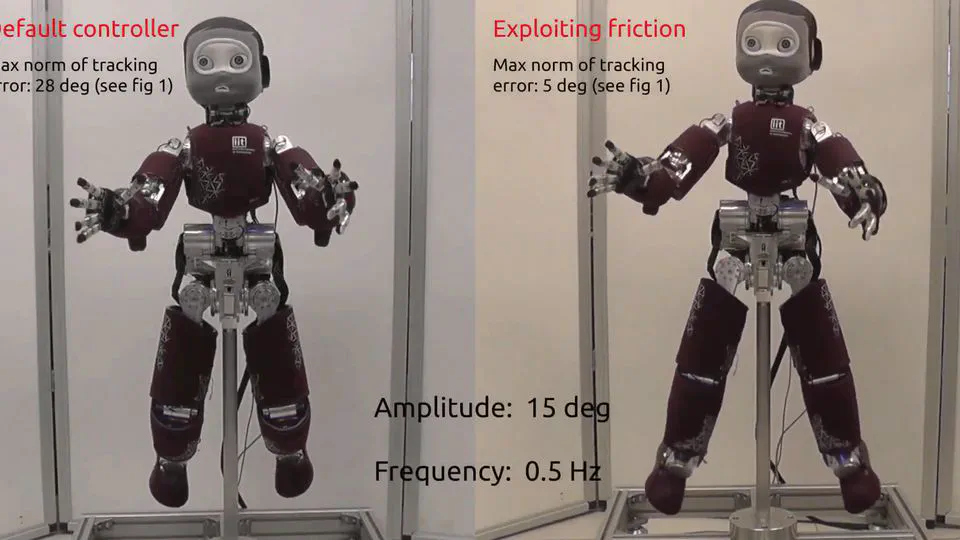
Istituto Italiano di Tecnologia- Stability analysis and design of force controllers for humanoid robots balancing using Quadratic Programming.
- Control of robots with Series Elastic Actuators and robot balancing in highly dynamic environments.
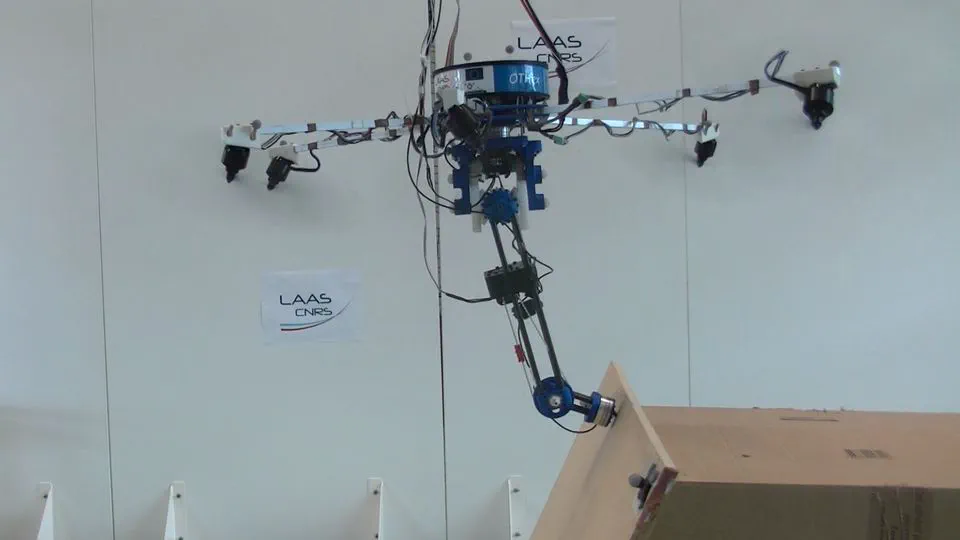
Visiting Ph.D.
Laboratory for Analysis and Architecture of Systems, Toulouse (FR)- Design of force control algorithms for aerial manipulators equipped with on board Force/Torque sensors.
Research Fellow
Istituto Italiano di Tecnologia- Design of force and momentum based whole-body controllers for humanoid robots, in the context of the European Projects KOROIBOT and CoDyCo.
Education
PhD in Bioengineering and Robotics
University of Genoa (IT)Thesis on Instantaneous Momentum-Based Control of Floating Base Systems.Read ThesisM.Sc. in Mechanical Engineering
Politecnico di Milano (IT)Thesis on Analysis and Synthesis of Balancing Controllers for Humanoid Robots.B.Sc. in Mechanical Engineering
Politecnico di Milano (IT)
A selection of projects that I have worked on over the years.